Un gyrocar est une automobile ŗ deux roues dont l'ťquilibre est assurť par un gyroscope.
Le premier prototype de Gyrocar, le Shilovski, a ťtť commandť en 1912 par le Comte russe Piotr Chilovski, avocat et membre de la famille royale Russe. Il a ťtť fabriquť suivant ses plans par la Wolseley Tool and Motor car Company en 1914, et fut prťsentť ŗ Londres la mÍme annťe. Le gyrocar est alimentť par un moteur Wolseley C5 modifiť, de 16 - 20 cv, avec un alťsage de 90 mm et une course de 121 mm. Il est montť devant le radiateur, entraÓnant la roue arriŤre par l'intermťdiaire d'un embrayage et d'une boÓte de vitesses classiques. Un frein de transmission est montť aprŤs la boÓte de vitesses - il n'y avait pas de freins sur les roues elles-mÍmes. Le poids du vťhicule est de 2,75 tonnes et il a un trŤs grand rayon de braquage. Il ťtait destinť ŗ un usage militaire sur des chemins particuliŤrement ťtroits. ņ la dťclaration de la guerre en 1914, Wolseley se retrouva pleinement occupťe aux fabrications militaires, et le gyrocar traÓna longtemps dans un atelier. La direction, sans nouvelles de Chilovski, supposa qu'il fut victime de la guerre, et dťcida d'enterrer le vťhicule. Il fut dťterrť en 1938, restaurť et exposť au musťe Wolseley.
Voici une photo de l'engin:
Ce concept de gyrocar est revenu ŗ la mode trŤs rťcemment.
Au CES 2017 de Las Vegas, le fameux salon Consumer Electronics Show consacrť aux innovations technologiques, Honda vient de prťsenter une moto stabilisťe par gyroscope, en l'occurrence une NC 750 S, qui tient toute seule debout ! Mieux encore : au pas, elle peut vous suivre ! LíAsimo version moto pourrait bien devenir le meilleur ami du motard. Vous trouverez une description de cette moto en cliquant
ici.
LitMotors a aussi dťveloppť cette moto ťlectrique dont la particularitť est de tenir ŗ l'ťquilibre seule.
2. Description de la maquette rťalisťe
2.1 Prťsentation de la maquette
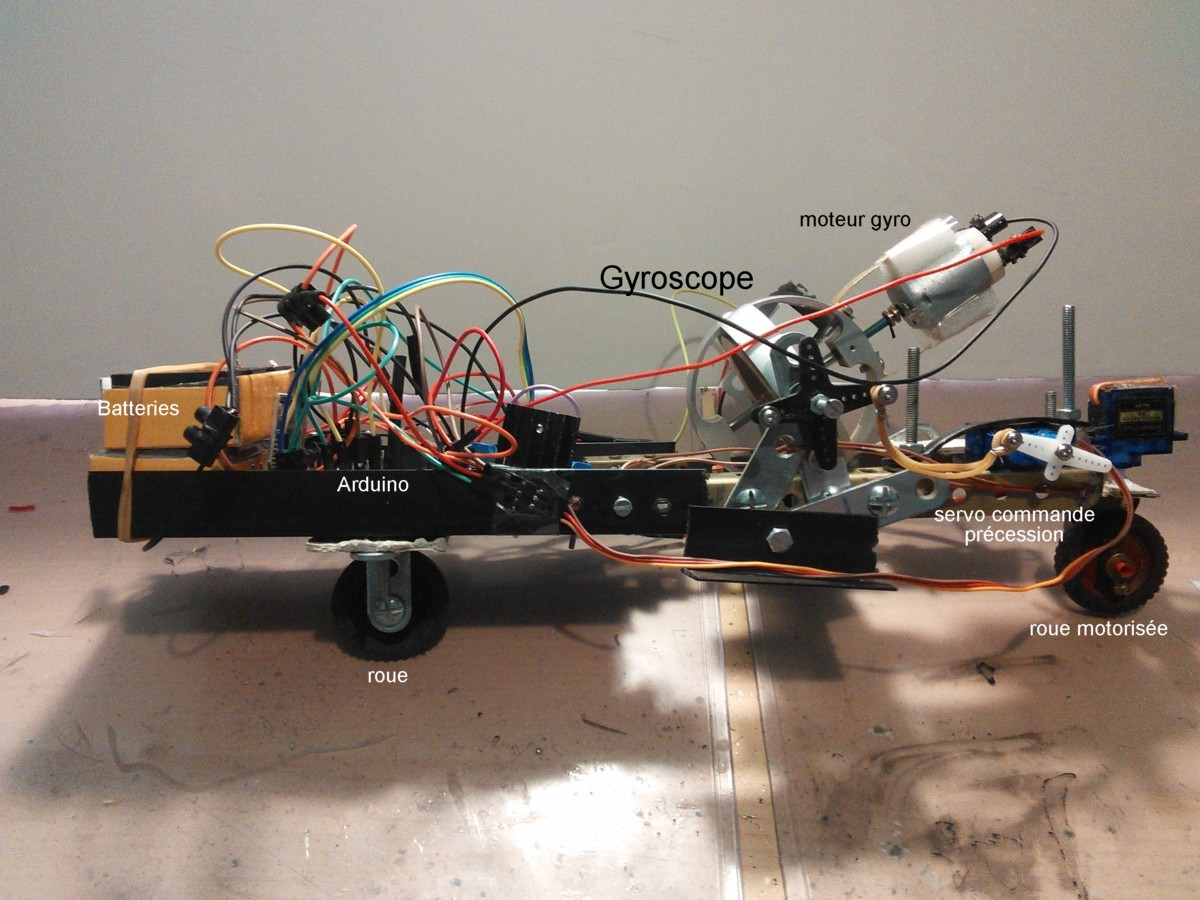
Vous pouvez voir ci-dessous une photo de la maquette rťalisťe.
Cette maquette comprends un gyroscope achetť chez GYROSCOPE.COM en Grande Bretagne. La roue du gyroscope est reliťe ŗ un moteur de 12 Volts. Ceci permet d'obtenir une vitesse de rotation de la roue supťrieure ŗ 12000 tours/min.
Le gyroscope est montť sur un chassis ťquipť de 2 roues "Meccano" dont l'une est motorisťe par un moto-rťducteur miniature. La commande de direction est assurťe par un servomoteur miniature.
L'engin est alimentť par 2 batteries Li-On de 8 Volts montťes en sťrie.
Le systŤme de commande utilise un module Arduino et est pilotť en Bluetooth par un smartphone ou une tablette Android avec une application intitulťe "gyrocar".
2.2 Stabilisation du gyroscope
Le centre de gravitť de l'ensemble roue du gyroscope et moteur est situť au dessus de l'axe de rotation horizontal. Dans ces conditions, le gyroscope effectue des oscillations dont l'amplitude augmente ŗ cause de la pesanteur jusqu'ŗ la chute de l'engin comme on peut le voir sur la vidťo ci-dessous.
Il est donc nťcessaire de stabiliser le gyroscope. La stabilisation est rťalisťe en controlant la prťcession du gyroscope ŗ l'aide d'un servomoteur dont le bras est reliť par un ťlastique ŗ l'axe vertical du gyroscope, ce qui permet d'appliquer une force dans le sens du dťplacement de l'engin. Le gyroscope rťagit en exerÁant une force perpendiculaire au dťplacement, ce qui permet de le redresser.
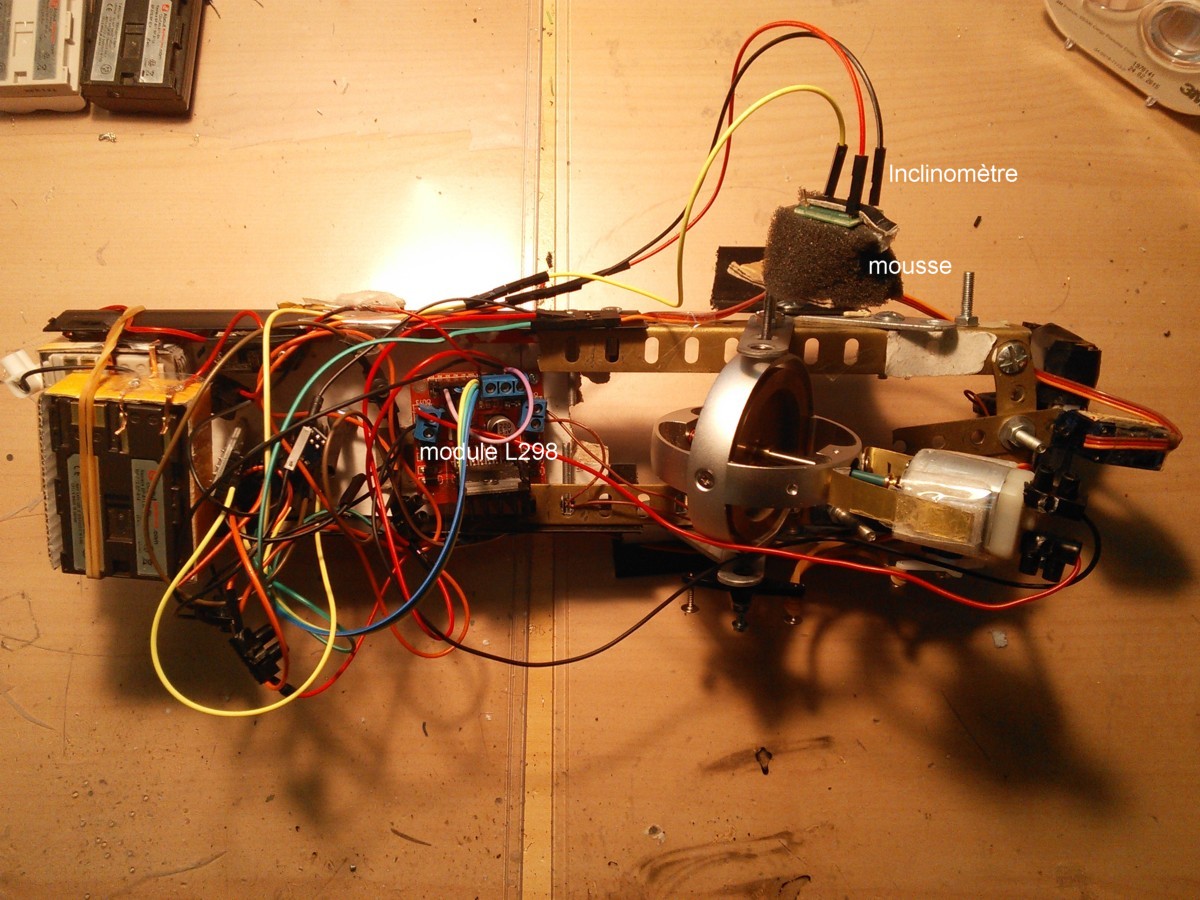
La mesure de l'inclinaison de l'axe vertical du gyroscope est rťalisťe par un module DE-ACCM2G2 basť autour d'un circuit intťgrť accťlťromŤtre LIS244ALH de ST MicroElectronics. Ce module dťlivre une sortie analogique permettant de mesurer l'inclinaison de l'axe vertical du gyroscope .
Ce module est fixť sur le carter du gyroscope avec de la mousse pour rťduire l'influence des vibrations comme on peut le voir sur la photo ci-dessous.
Un module ARDUINO est utilisť pour effectuer les calculs d'asservissement du gyroscope.
A partir des valeurs d'inclinaison verticale, l'ARDUINO calcule la rotation du servo permettant de stabiliser la plate-forme.
J'ai utilisť le systŤme PID (Proportionnel Intťgrale Dťrivťe) qui est dťcrit sur le site de Telecom-Robotics.
Le principe de base de tout asservissement est de prendre des mesures ŗ la sortie, de les rťinjecter ŗ l'entrťe pour comparer ŗ la consigne afin d'obtenir l'erreur (ie la diffťrence entre la mesure rťelle et la consigne demandťe). Quand elle est nulle, le servo a atteint la vitesse de consigne et donc il n'y a plus rien ŗ actionner. Ce systŤme est dit en boucle fermťe, puisque la sortie du systŤme est rťinjectťe dans l'entrťe.
Pour mon application, je me suis limitť ŗ un asservissement proportionnel et dťrivťe qui permet d'obtenir des rťsultats satisfaisants.
Soit y la tension de sortie de l'accťlťromŤtre qui donne l'inclinaison de l'axe du gyroscope par rapport ŗ la verticale. yref est la valeur correspondant ŗ la verticale (angle nul).
L'ťquation qui relie la position du servo (pos) ŗ y est la suivante:
pos(t) = k1 x (y(t) - yref) + k2 x dy(t)/dt
La frťquence d'ťchantillonnage est d'environ 5 Hz, soit un ťchantillon y(n) toutes les 200 ms.
L'ťquation ci-dessus s'ťcrit alors:
pos(n) = k1 x (y(n) - yref) + k2 x (y(n) - y(n-1))
Si y>yref et y(n)>y(n-1), la plateforme penche d'un cŰtť et l'axe du gyroscope s'est dťplaÁť par rapport ŗ la verticale (angle positif croissant) et le servo passe ŗ une valeur supťriere ŗ 90 degrťs ce qui entraine une force qui va redresser la plateforme. L'axe du gyroscope va repartir dans l'autre sens ( angle positif dťcroissant) et la valeur du servo repasse ŗ la valeur moyenne (90 degrťs) jusqu'ŗ ce que l'angle devienne nťgatif croissant.
Les coefficients k1 et k2 sont ŗ dťterminer expťrimentalement en fonction de la vitesse de rotation et du poids de la roue du gyroscope.
Pour cette maquette, j'utilise les valeurs suivantes: k1=0.5 et k2=2
On peut voir sur la vidťo ci-dessous le rťsultat obtenu. La stabilisation est bonne mÍme en prťsence de mouvements du gyrocar.
2.3 Description du systŤme de commande
Pour commander le gyrocar, il faut les composants suivants:
- une batterie de 16V constituťe par la mise en sťrie de deux batteries Li-On de 8 V
- un module ARDUINO (j'ai utilisť un Arduino Nano)
- un module BLUETOOTH HC-05 qui permet de piloter le gyrocar en Bluetooth par un smartphone ou une tablette
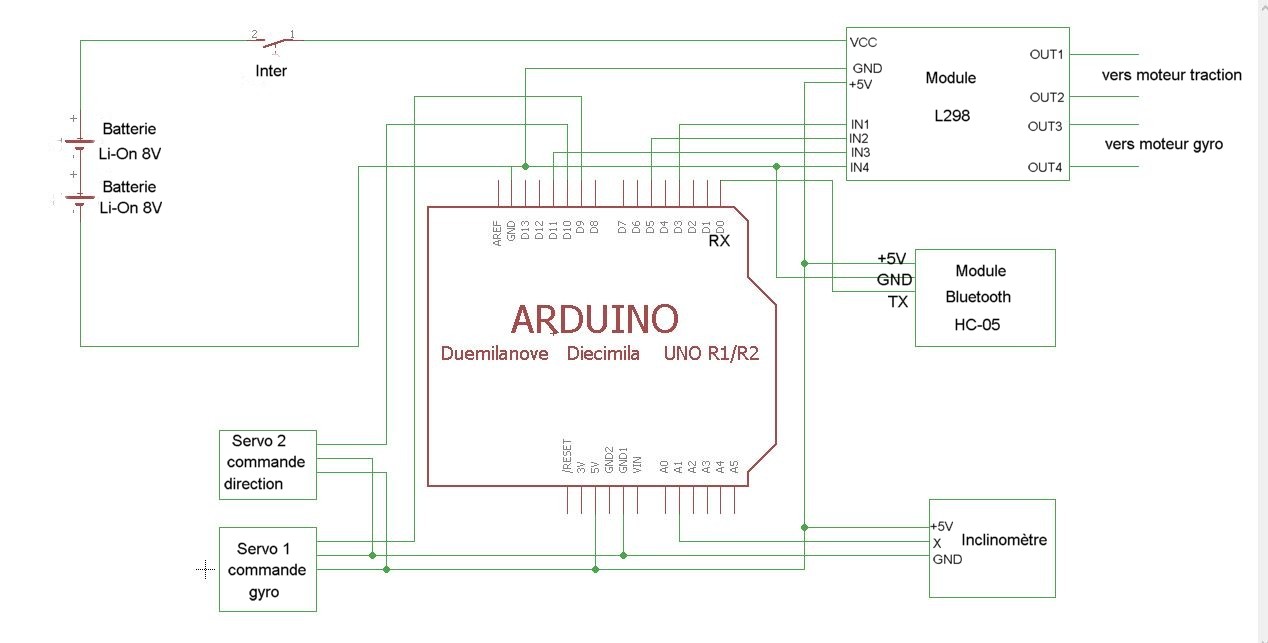
- un module de pilotage de moteur L298N reliť d'un cŰtť ŗ l'Arduino et de l'autre au moteur de traction et au moteur du gyroscope
- deux servo moteurs. L'un est utilisť pour la stabilisation du gyroscope et l'autre pour la commande de direction du gyrocar.
Le schťma du systŤme de commande est donnť sur la figure ci-dessous.
2.4 Programme Arduino
Le programme de l'Arduino rťalise les fonctions suivantes:
- stabilisation du gyroscope: ŗ partir de la valeur de l'inclinaison du gyroscope reÁue sur l'entrťe A1, le programme commande sur la sortie D9 le servomoteur Nį 1 qui agit sur la prťcession du gyroscope
- commande du moteur de traction reliť aux sorties OUT3 et OUT4 du module L298
- commande du moteur du gyroscope reliť aux sorties OUT1 et OUT2 du module L298
- commande sur la sortie D10 du servomoteur Nį2 qui agit sur la direction du gyrocar
Vous pouvez tťlťcharger ce programme en cliquant ici.
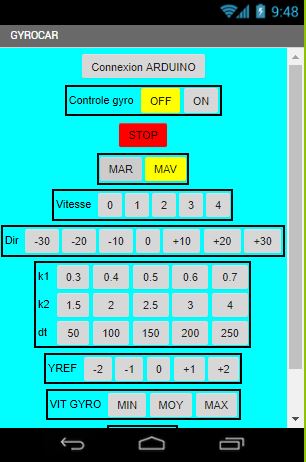
2.5 Application Android GYROCAR
Cette application appelťe GYROCAR se connecte en Bluetooth ŗ l'Arduino qui commande le gyrocar par l'intermťdiaire du module HC-05.
Cette application permet de commander les fonctions suivantes:
- marche avant, marche arriŤre
- controle de la vitesse
- controle de la direction
- ajustement des paramŤtres du systŤme de stabilisation du gyroscope ( YREF, dt, k1, k2)
J'ai rťalisť cette application ŗ l'aide du logiciel en ligne intitulť
MIT App Inventor 2 que l'on peut trouver ŗ l'adresse suivante: http://ai2.appinventor.mit.edu/
Ce logiciel est trŤs facile ŗ utiliser et permet de crťer une
application ANDROID trŤs rapidement sans connaÓtre le language Java.
Vous pouvez voir ci-dessous une copie d'ťcran de la tablette.
Vous pouvez tťlťcharger cette application en cliquant ici.
Le dossier intitulť gyrocar_android.zip comprends:
- le fichier gyrocar.apk qui est l'application ANDROID ŗ tťlťcharger et installer sur le smartphone
- le fichier gyrocar.aia qui est le code source ŗ ouvrir avec le logiciel MIT App Inventor 2 pour effectuer des modifications
- un tableau Excel qui donne les commandes envoyťes par l'application ŗ l'Arduino ( chaque commande correspond ŗ un seul octet transmis vers l'Arduino
2.6 Rťsultats obtenus
La vidťo ci-dessous montre le gyrocar en action pilotť par une tablette avec l'application "gyrocar".