Réalisation de maquettes de monorails gyroscopiques et d'un petit réseau
1. Le principe
Il s'agit d'engins qui roulent sur un seul rail et qui utilisent un système à base de gyroscope pour les stabiliser. En effet, le véhicule roule sur un rail conventionnel unique, de sorte qu'en l'absence d'un système d'équilibrage, il ne peut que tomber.
Le principe de la bicyclette est bien connu. La rotation des roues a déjà des effets stabilisateurs. Mais quand un cycliste peut faire des petits écarts pour rétablir son équilibre, un véhicule sur un rail rigide nécessite dans tous les cas un gyroscope séparé pour se tenir debout.
Pour stabiliser le véhicule, il faut donc un gyroscope.
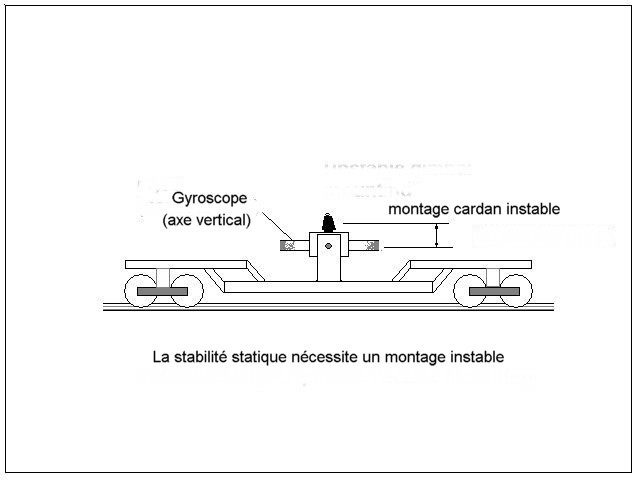
Une roue en rotation est montée dans un cardan dont l'axe de rotation (l'axe de précession) est perpendiculaire à l'axe de rotation de la roue. L'ensemble est monté sur le châssis du véhicule de telle manière que, à l'équilibre, l'axe de rotation, l'axe de précession et l'axe de roulis du véhicule sont perpendiculaires entre eux.
Forcer le cardan à tourner entraine une précession de la roue résultant en des forces autour de l'axe de roulis de sorte que le mécanisme a le potentiel de redresser le véhicule en cas d'inclinaison par rapport à la verticale. (voir figure ci-dessous).
Récemment, plusieurs modèles réduits ont été réalisés par des modélistes, essentiellement au Japon et les résultats obtenus sont impressionnants.
On peut citer le travail remarquable de MORI Hiroshi qui a réalisé un modèle réduit pour train de jardin.
Pour accéder à son site, cliquez ici.
J'ai trouvé ce principe de locomotion particulièrement original et j'ai voulu le tester par moi-même.
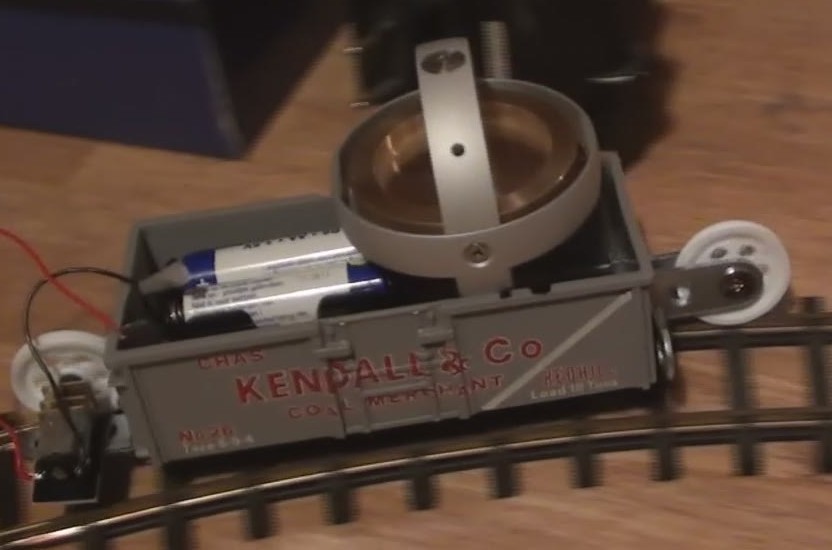
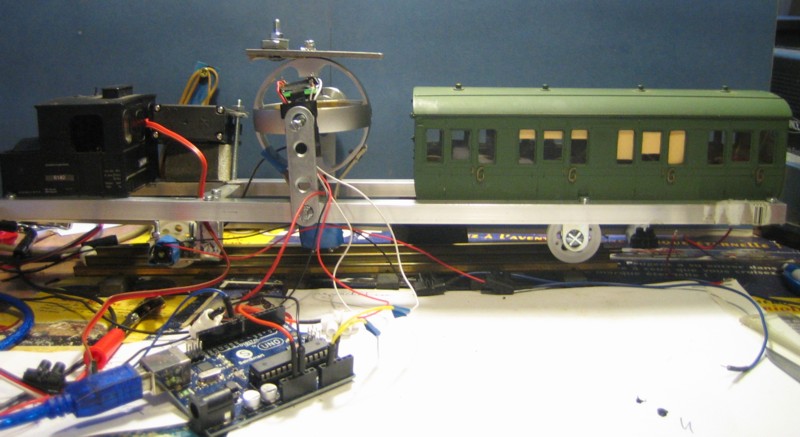
J'ai acheté un gyroscope chez GYROSCOPE.COM en Grande Bretagne et je l'ai simplement posé dans un wagon LIMA que j'ai équipé de deux roues (une à l'avant et l'autre à l'arrière). Une des roues est motorisée par un moto-réducteur miniature alimenté par une batterie de 6 Volts.
Vous pouvez voir ci-dessous une photo du gyroscope seul et du wagon LIMA avec le gyroscope.
Et voici une petite vidéo qui montre les premiers résultats obtenus dans le bureau.
La vidéo ci-dessous montre la première circulation sur le réseau modulaire.
La roue du gyroscope est lançée par le moteur fourni avec le gyroscope, puis le gyroscope est posé sur le wagon. Le système fonctionne pendant 30 secondes environ avant de tomber sur le côté
4. Stabilisation du gyroscope.
La stabilisation gyroscopique semble facile. Vous fixez un gyroscope sur le châssis avec l'axe de rotation vertical et le gyroscope refuse de se renverser. Simple, oui?
Non, ce n'est pas aussi simple que cela. Si vous avez un gyroscope en rotation et que vous essayez de faire tourner son axe de rotation, le gyroscope va essayer de tourner autour d'un axe perpendiculaire à votre axe de force; c'est la précession. Ainsi, lorsque le véhicule s'incline latéralement, le couple de précession du gyroscope généré s'incline dans une direction avant-arrière qui n'est pas très utile. D'où la nécessité d'un mécanisme pour créer indirectement une force de rappel sur le côté.
J'ai testé deux méthodes:
- la stabilisation par contre-poids
- la stabilisation par friction.
4.1. La stabilisation par contre-poids.
Un poids de 100 grammes est fixé sur le bras d'un servomoteur. Ce poids se déplace latéralement sur la plateforme du véhicule. Le centre du bras est fixé sur l'axe du servo qui est plaçé à mi largeur de la plateforme. Lorque le véhicule penche d'un côté, le poids se déplace de l'autre côté, ce qui permet de maintenir l'équilibre.
Cette méthode fonctionne assez bien et est simple à mettre en oeuvre. L'inconvénient est l'encombrement du dispositif et l'augmentation du poids du véhicule.
4.2. La stabilisation par friction.
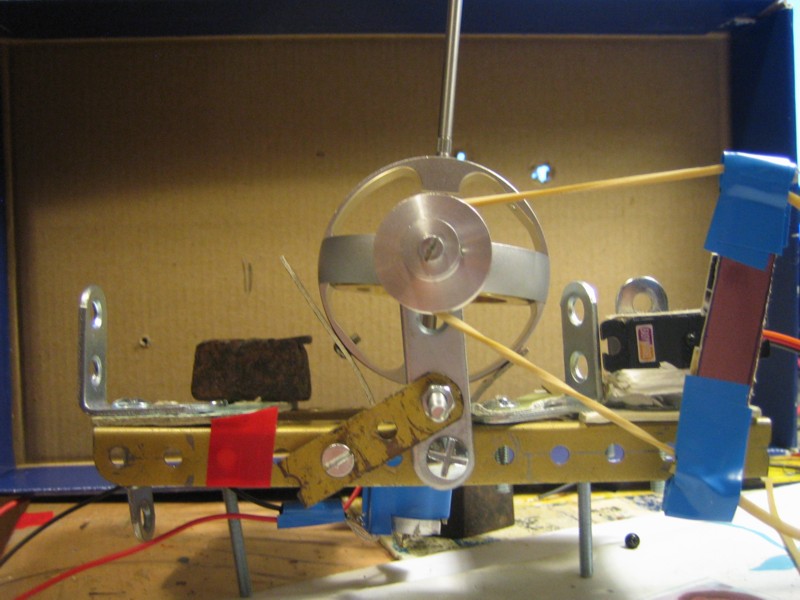
Cette méthode utilise la précession du gyroscope pour maintenir l'équilibre. Lorsque le véhicule penche, la précession va entrainer une inclinaison de l'axe de rotation par rapport à la verticale. Si on exerce une force sur l'axe de rotation dans le sens de l'inclinaison, la précession va entrainer une force perpendiculaire qui tend à redresser le véhicule.Le problème est que l'axe de rotation vertical doit rester libre de se mouvoir et la force doit être appliquée quelque soit l'inclinaison de l'axe de rotation. Une solution possible à ce problème est d'utiliser un élastique. Une poulie est fixée sur l'axe de rotation horizontal et cette poulie est reliée au bras d'un servomoteur par un élastique.Lorque le servomoteur déplace son bras, une force de friction est appliquée sur la poulie qui déplace l'axe vertical du gyroscope. Lorsque le servomoteur n'est pas en action, la pression exercée par l'élastique sur la poulie n'est pas suffisante pour bloquer le mouvement de l'axe vertical qui reste libre de se mouvoir.
La photo ci-dessous montre le montage de test utilisé pour valider le principe.
La vidéo ci-dessous montre le système en action avec commande manuelle du servo.
4.3. La stabilisation par accélération-décélération.
Cette méthode utilise aussi la précession du gyroscope pour maintenir l'équilibre. Lorsque le véhicule penche à droite , la précession va entrainer une inclinaison de l'axe de rotation par rapport à la verticale. Si le véhicule accélère, celà exerce une force sur l'axe de rotation dans le sens de l'inclinaison et la précession va entrainer une force perpendiculaire qui tend à redresser le véhicule. Lorsque le véhicule penche à gauche, une décélération permet de redresser le véhicule. Ce principe est mis en oeuvre dans le gyroscope jouet appelé "gyrobot" et marche très bien. L'inconvénient est que le véhicule n'est pas stable à l'arrêt.
4.4. La mesure de l'inclinaison
La mesure de l'inclinaison de l'axe vertical du gyroscope et de la plateforme du véhicule est réalisé par un module DE-ACCM2G2 basé autour d'un circuit intégré accéléromètre LIS244ALH de ST MicroElectronics. Ce module délivre deux sorties analogiques permettant de mesurer l'inclinaison de l'axe vertical du gyroscope et l'inclinaison de la plateforme par rapport à l'horizontale.
Ce module est fixé sur le carter du gyroscope.
4.5. Asservissement utilisant un module ARDUINO
Un module ARDUINO est utilisé pour effectuer les calculs d'asservissement du gyroscope.
A partir des valeurs d'inclinaison horizontale et verticale, l''ARDUINO calcule la rotation du servo permettant de stabiliser la plate-forme.
J'ai utilisé le système PID (Proportionnel Intégrale Dérivée) qui est décrit sur le site de Telecom-Robotics.
Le principe de base de tout asservissement est de prendre des mesures à la sortie, de les réinjecter à l'entrée pour comparer à la consigne afin d'obtenir l'erreur (ie la différence entre la mesure réelle et la consigne demandée). Quand elle est nulle, le servo a atteint la vitesse de consigne et donc il n'y a plus rien à actionner. Ce système est dit en boucle fermée, puisque la sortie du système est réinjectée dans l'entrée.
Pour mon application, je me suis limité à un asservissement proportionnel et dérivée qui permet d'obtenir des résultats satisfaisants.
Soit y la tension de sortie de l'accéléromètre qui donne l'inclinaison de l'axe du gyroscope par rapport à la verticale. yref est la valeur correspondant à la verticale (angle nul).
L'équation qui relie la position du servo (pos) à y est la suivante:
pos(t) = k1 x (y(t) - yref) + k2 x dy(t)/dt
La fréquence d'échantillonnage est d'environ 10 Hz, soit un échantillon y(n) toutes les 100 ms.
L'équation ci-dessus s'écrit alors:
pos(n) = k1 x (y(n) - yref) + k2 x (y(n) - y(n-1))
Si y>yref et y(n)>y(n-1), la plateforme penche d'un côté et l'axe du gyroscope s'est déplaçé par rapport à la verticale (angle positif croissant) et le servo passe à une valeur supériere à 90 degrés ce qui entraine une force qui va redresser la plateforme. L'axe du gyroscope va repartir dans l'autre sens ( angle positif décroissant) et la valeur du servo repasse à la valeur moyenne (90 degrés) jusqu'à ce que l'angle devienne négatif croissant.
Les coefficients k1 et k2 sont à déterminer expérimentalement en fonction de la vitesse de rotation et du poids de la roue du gyroscope.
Pour la maquette de démonstration, j'utilise les valeurs suivantes: k1=0.4 et k2=2
5. Les maquettes réalisées
5.1 Prototype de validation des principes
Le prototype a une longueur de 41 cm et une largeur de 8 cm.
Le chassis est constitué de cornières en laiton. La cabine de conduite et le compartiment voyageurs sont réalisés en carton.
Dans cette première version réalisée en septembre 2014, j'utilise une stabilisation par contre-poids..
Le prototype est constitué des sous-ensembles suivants:
- un gyroscope de marque GYROSCOPE.COM dont la roue est actionnée par un moteur miniature
- un détecteur d'inclinaison
- un servo dont le bras actionne un poids de 100 grammes
- un module ARDUINO qui reçoit les signaux du détecteur d'inclinaison et commande le servo.
- une batterie Li-On de 7,6V en série avec 2 piles de 1,5V
- un moteur de traction constitué par un moto-réducteur miniature fixé sur la roue avant tractrice
- un récepteur 41MHz et un variateur de vitesse connecté au moteur de traction
Voici une photo de la première version du prototype.
Et voici une petite vidéo qui montre le gyro-monorail en action sur un petit tronçon de rail.
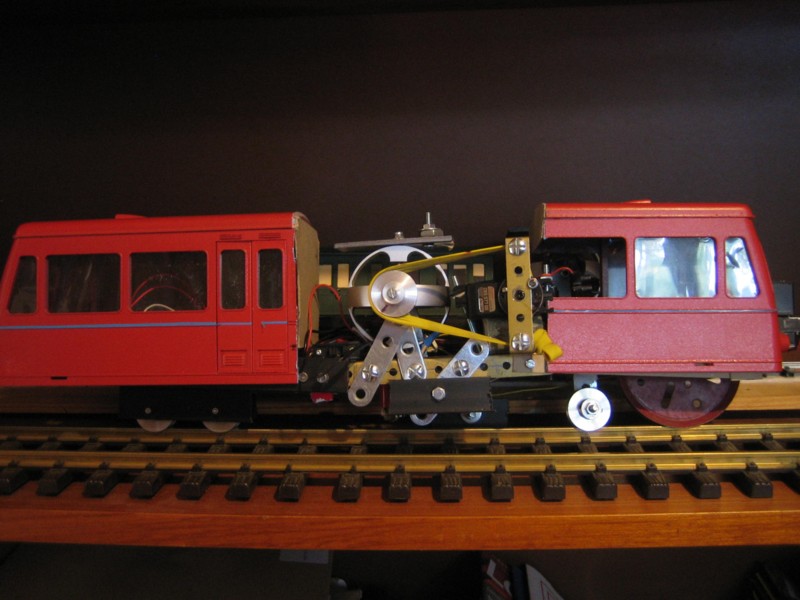
5.2 Monorail gyroscopique à l'échelle 1/20 ème.
Voici une photo de la maquette au début 2016.
Ce monorail est prévu pour rouler sur un rail LGB pour train de jardin. Il s'inspire très librement du monorail de Shilovsky.
La longueur est de 47 cm et la largeur est de 9 cm.
Le système de stabilisation du gyroscope par contre-poids a été remplaçé par un système par friction.
La traction est assurée par un mini moto-réducteur fixé sur une roue du boggie avant.
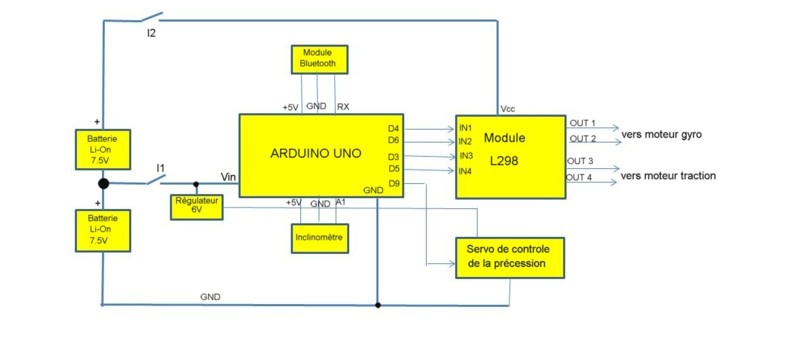
Le schéma du dispositif est donné ci-dessous:
La maquette est pilotée en Bluetooth par une tablette Android avec une application que j'ai créée avec le logiciel APP INVENTOR.
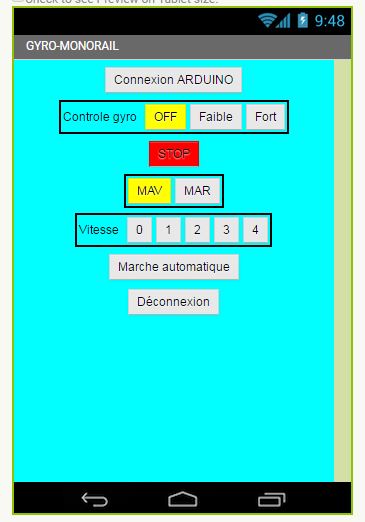
Voici une vue de l'écran de la tablette.
Les commandes sont les suivantes
- connexion au module Bluetooth du monorail
- controle du gyroscope
- commande du sens de marche: marche avant, arrière et stop
- commande de la vitesse
L'interrupteur I1 commande la mise en marche de l'ARDUINO et de l'alimentation du servo de commande de la précession du gyroscope.
L'interrupteur I2 commande la mise en marche du module L298 qui controle le moteur du gyroscope et le moteur de traction.
L'ARDUINO UNO assure la stabilisation du gyroscope et aussi les commandes des moteurs via un module L298.
Vous pouvez télécharger le programme ARDUINO qui commande le gyroscope et le moteur de traction ainsi que l'application ANDROID en cliquant
ici.
La video ci-dessous montre la maquette en circulation sur un tronçon de rail LGB
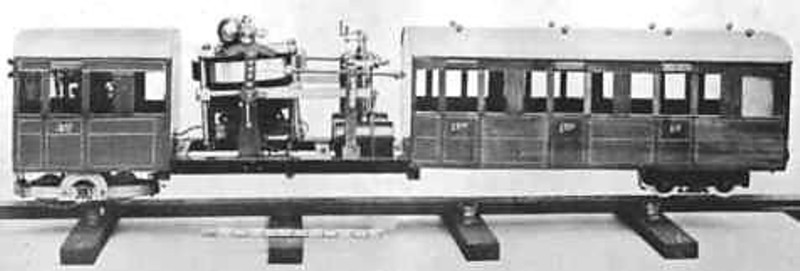
5.3 Réalisation d'une maquette à l'échelle Zéro du monorail de SCHILOVSKI
J'ai réalisé en 2014 une maquette de gyro-monorail à l'échelle zéro qui s'inspire librement du prototype de SCHILOVSKI que vous pouvez voir sur la photo ci-dessous.
L'intérêt de ce prototype est d'utiliser un gyroscope à axe vertical et de conserver la présentation du gyroscope à l'extérieur, ce qui est plus intéressant pour les visiteurs lors d'expositions.
Dans cette maquette à l'échelle zéro , le système de stabilisation du gyroscope est un système par friction.
La maquette a une longueur de 40 cm et une largeur de 7 cm.
Le chassis est constitué de cornières en laiton. La cabine de conduite est en plastique et le compartiment voyageurs est réalisé en plasticard.
La maquette est pilotée en Bluetooth par une tablette Android avec une application que j'ai créée avec le logiciel APP INVENTOR.
La maquette est constituée des sous-ensembles mécaniques et électroniques suivants:
- un gyroscope de marque GYROSCOPE.COM dont la roue est actionnée par un moteur miniature
- un détecteur d'inclinaison fixé sur le carter du gyroscope
- un servo dont le bras est relié par une courroie métallique à une poulie fixée sur le carter du gyroscope
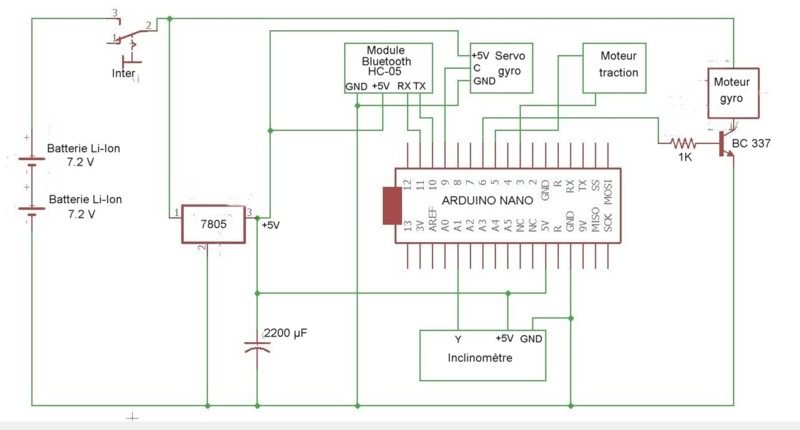
- un module ARDUINO NANO qui reçoit les signaux du détecteur d'inclinaison et commande le servo.
- deux batteries Li-On de 7,6V en série achetées chez AboutBatteries.
- un moteur de traction constitué par un moto-réducteur miniature fixé sur la roue avant tractrice
- un module HC-05 qui reçoit les commandes de la tablette en Bluetooth et les transmet à l'ARDUINO
Le schéma du dispositif est donné ci-dessous:
Vous pouvez télécharger le programme ARDUINO qui commande le gyroscope et le moteur de traction ainsi que l'application ANDROID en cliquant
ici.
Voici une photo de la maquette en cours de réalisation.
Et voici trois photos de la maquette pratiquement terminée.
La video ci-dessous montre les premiers essais de la maquette en novembre 2014.
5.4 Réalisation d'une maquette du monorail de BRENNAN à partir d'un gyrobot
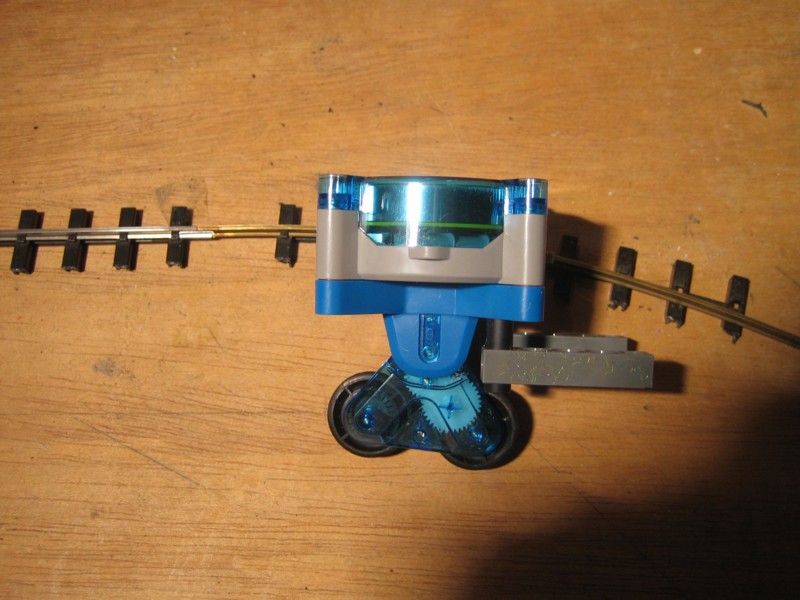
Cette maquette est un jouet qui évoque le monorail de Brennan. Elle est basée sur un gyroscope jouet dénommé "GYROBOT" ou "GYRO-Roboter" et acheté en Allemagne.
Vous pouvez voir ci-dessous une photo du "GYRO Roboter"
Et voici une vidéo du "GYRO Roboter" en action sur un tronçon de rail.
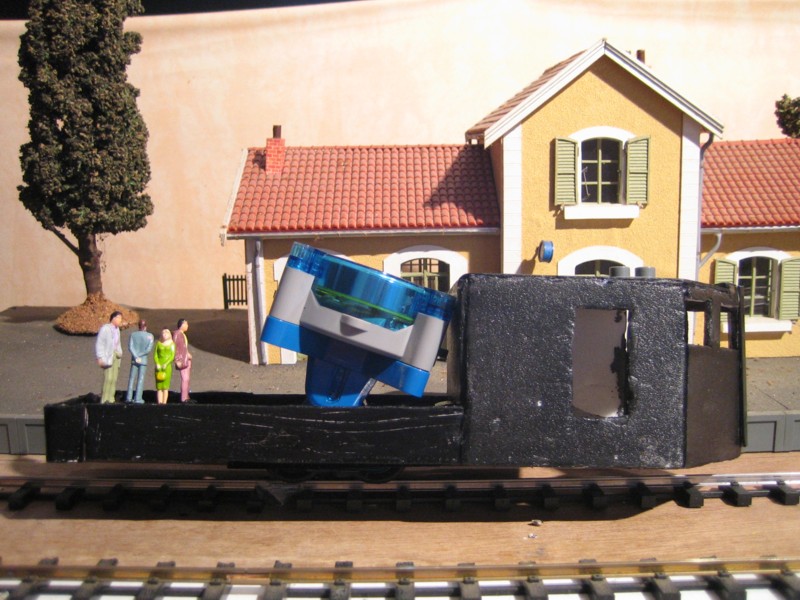
J'ai inséré ce jouet dans une caisse réalisée en dépron pour minimiser le poids qui évoque le monorail de Brennan à l'échelle zéro.
Les dimensions de la maquette sont: longueur 24 cm, largeur 8 cm et hauteur 10 cm.
Vous pouvez voir ci-dessous une photo de la maquette .
6. Réseau de monorails
6.1 Description du réseau
La construction du réseau a démarré en janvier 2015.
Le réseau est fixé sur une table à tapisser de longueur 2 mètres et de largeur 0,70 mètre.
Il est constitué des éléments suivants:
- une gare et une halle à marchandises
- 3 tronçons de voies à un seul rail
- une plaque tournante réalisée à partir d'un moteur pas à pas sur lequel est fixé un CD-ROM. Le moteur pas à pas est piloté par un module ARDUINO.
Vous pouvez voir ci-dessous des photos du réseau en mars 2015
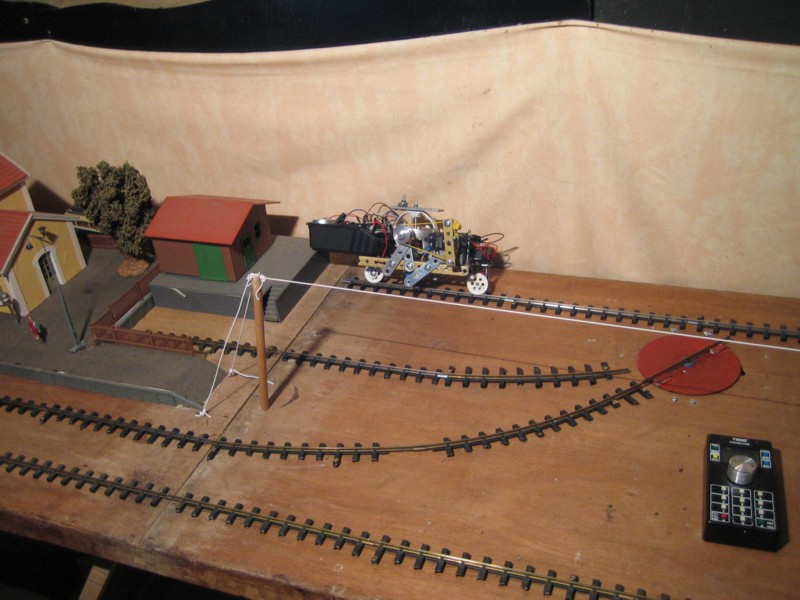
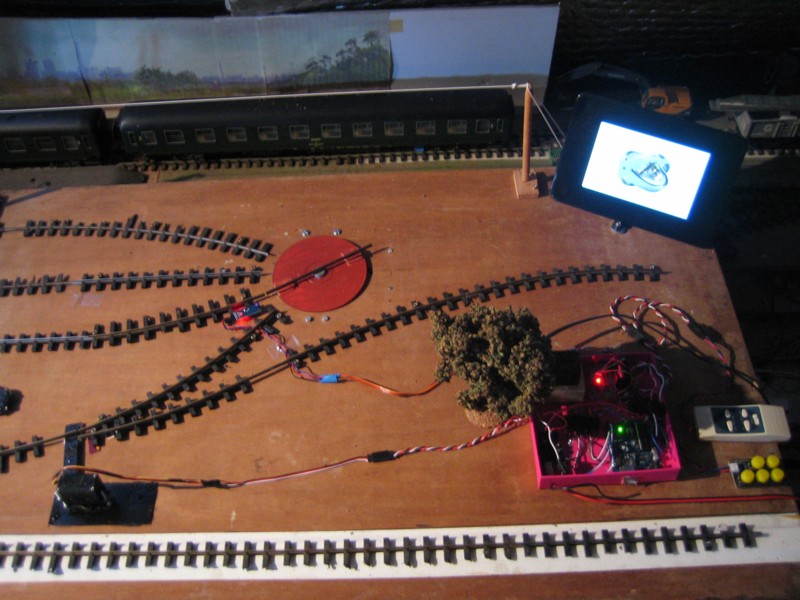
En mai 2015, quelques éléments ont été ajoutés au réseau:
- un aiguillage commandé par un servo-moteur relié à l'ARDUINO
- deux nouvelles voies desservant la plaque tournante
- un détecteur infra-rouge à réflexion connecté à l'ARDUINO qui permet de détecter la présence d'un monorail qui pénêtre sur la plaque tournante et déclenche la rotation de la plaque.
La photo ci-dessous montre ces éléments.
6.2 Vidéos enregistrées sur le réseau en avril 2015
Le réseau permet de faire quatre présentations que l'on peut voir sur les vidéos ci-après.
- la maquette d'essai qui fait un aller-retour depuis la gare
- la maquette d'un monorail de Shilovski en action sur la voie de 2 mètres
- le gyrobot qui circule sur un fil tendu à 20 cm au dessus du réseau
- la maquette d'un monorail de Brennan réalisée à partir du gyrobot et qui passe sur la plaque tournante.