Les principes de la levitation magnétique et ses applications aux monorails
1. Les principes de la levitation magnétique
La lévitation magnétique est le processus par lequel un objet est suspendu au-dessus d'un autre objet grace à des champs magnétiques qui vont contrecarrer les effets de la force de gravité.
La stabilité d'aimants permanents dans un champ magnétique est impossible d'après le théorème d'Earnshaw.. Cependant on peut contourner de différentes façons les hypothèses de ce théorème. Il y a au moins quatre moyens d'y parvenir:
1.1 La "pseudo" levitation
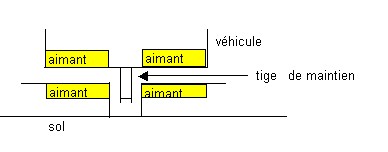
Si on place un aimant permanent au dessus d'un autre aimant avec des pôles opposés, ils vont se repousser mais le système est instable. Si on lache l'un des aimants, il va se retourner pour venir se coller à l'autre. Cependant, si l'un des aimants a un point d'appui qui l'empêche de basculer, on bénéficie encore de l'effet de sustentation magnétique et l'on réduit les frottements. C'est ce qu'on appelle la "pseudo" levitation.
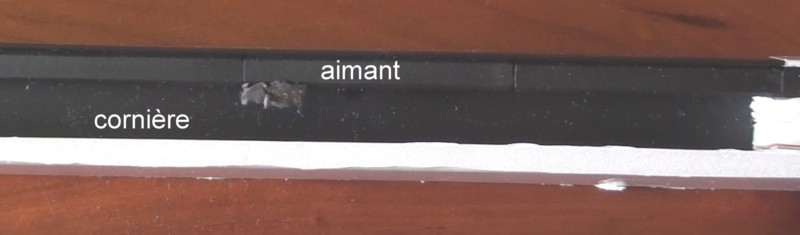
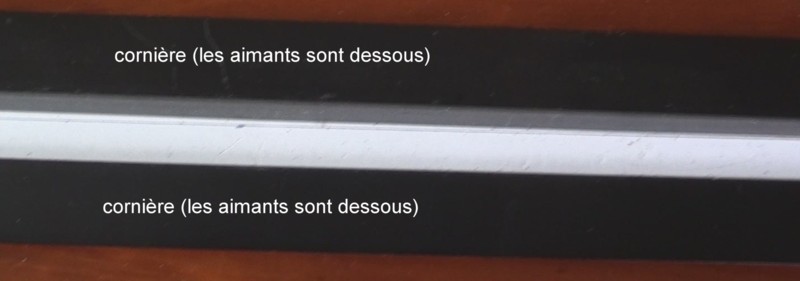
J'ai réalisé une petite maquette pour tester cette méthode. La voie est constituée de deux bandes d'aimants situés parallèlement sous des cornières en plastique comme on peut le voir sur les photos ci-dessous
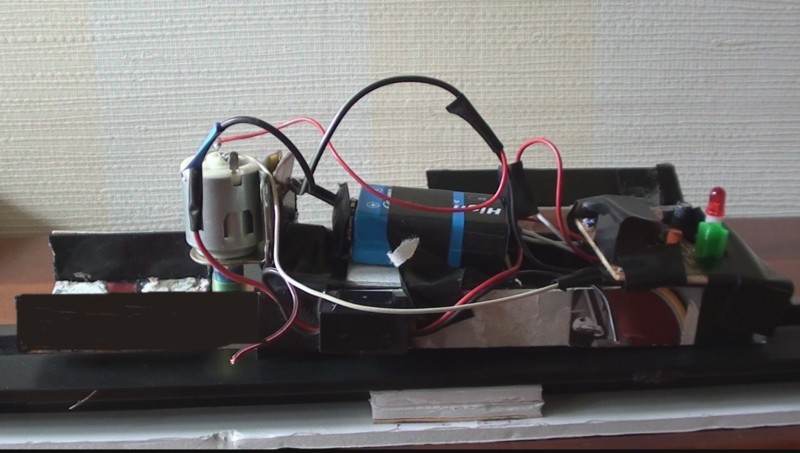
Le véhicule est constitué par une plaque de carton sur laquelle 4 aimants sont fixés. Sous la plaque, deux tiges verticales frottent contre l'une des cornières, ce qui assure la stabilité. L'une des tiges est reliée à un moteur électrique qui assure la propulsion.
Voici une photo de l'engin:
Et voici une vidéo qui montre les tests réalisés.
J'ai aussi réalisé un monorail jouet qui exploite ce principe et que vous pouvez voir en cliquant ici..
La société japonaise Takara Tomy a sorti fin 2015 une belle maquette qui représente le maglev japonais et qui utilise la pseudo levitation magnétique.
La propulsion est assurée par des roues qui frottent sur une des parois comme on peut le voir sur la photo ci-dessous.
Le modèle peut être acheté chez JAPANTRENDSHOP.
Vous pouvez voir ci-dessous une vidéo qui présente le modèle.
1.2. L'utilisation d'électroaimants avec un servo-mécanisme
Il est possible de faire léviter un objet en modifiant constamment la force d'un champ magnétique produit par des électro-aimants à l'aide d'une boucle de rétroaction . Dans la plupart des cas, l'effet de sustentation est principalement du à des aimants permanents, car ils ne possèdent pas de dissipation de puissance et les électro-aimants sont utilisés uniquement pour la stabilisation..C'est ce principe qui est utilisé dans le train TRANSRAPID.
Le système comprend trois éléments:
- un ou plusieurs électro-aimants utilisés pour modifier l'intensité du champ magnétique
- un capteur à effet Hall qui permet de mesurer le champ magnétique
- un micro-processeur qui effectue les calculs de stabilité
Le système fonctionne en modifiant continuellement le courant envoyé aux électro-aimants pour modifier l'intensité du champ magnétique et permettre une lévitation stable. Une boucle de rétroaction ajuste en permanence un ou plusieurs électroaimants pour corriger le mouvement de l'objet, ce qui annule l'instabilité.
Vous trouverez la description d'une maquette réalisée par Polytech’Tours en cliquant ici..
J'ai acheté en mai 2015 une maquette qui illustre ce principe et que vous pouvez voir en cliquant ici...
1.3. Le lévitron
Il s'agit d'un aimant en rotation au dessus d'un autre aimant et qui est stabilisé par un mouvement de précession gyroscopique.
Voici une vidéo qui présente ce dispositif.
1.4. L'utilisation de matériaux diamagnétiques
On peut utiliser des matériaux diamagnétiques qui créent un champ magnétique de sens opposé au champ appliqué Par exemple, le carbone est diamagnétique et il est possible de faire léviter un crayon au dessus d'un aimant permanent mais il faut un champ magnétique intense et ce principe n'est pas apllicable en pratique sauf dans un cas: la supraconductivité.
1.5. L'utilisation de matériaux supraconducteurs
Ces matériaux à très basse température, deviennent alors parfaitement diamagnétiques.
Dans un supraconducteur, deux effets différents permettent de faire léviter un aimant : l’effet Meissner, et le piégeage des vortex. L’effet Meissner va repousser l’aimant du supraconducteur, alors que le piégeage des vortex va maintenir l’aimant à l’endroit où il se trouvait quand le supraconducteur a été refroidi. Autrement dit, l’un repousse, et l’autre piège (sans attirer pour autant). On observe l’un ou l’autre de ces effets selon la nature du matériau et la force de l’aimant. Le train MAGLEV japonais utilise ce principe.
La video ci-dessous montre une maquette de MAGLEV en action:
2. La propulsion par moteur linéaire synchrone
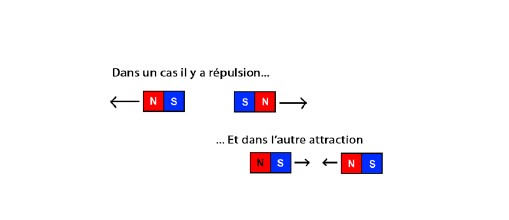
Des forces électromagnétiques sont utilisées afin de propulser le train, en fonctionnant sur un principe de base du
magnétisme : deux mêmes pôles se repoussent, alors que deux pôles contraires s’attirent.
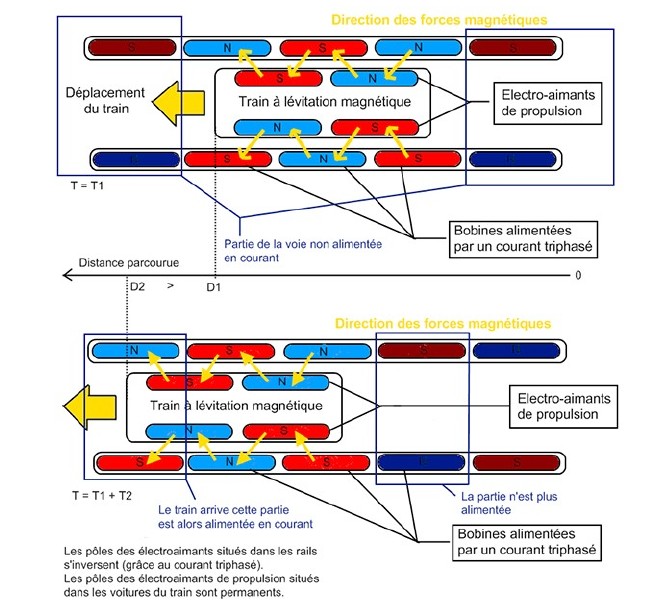
Des électroaimants (ou des bobines supraconductrices) sont positionnés le long des voitures composant le train, et des
bobines alimentées par un courant triphasé sont disposées le long des rails. Ainsi, le train est en permanence attiré et
repoussé dans le sens de son déplacement. La propulsion est assurée par un moteur linéaire synchrone à stator long dont le principe est donné sur la figure ci-dessous.
Le moteur linéaire synchrone des trains comprend un rotor (placé sur la voie) et un stator (placé sous le wagon), les
deux étant dissociés l'un de l'autre.
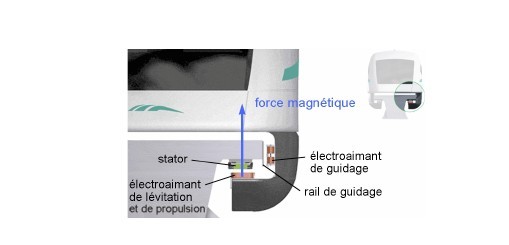
Application au monorail TRANSRAPID
La photo ci-dessous montre le système de lévitation et de propulsion du TRANSRAPID allemand
Lorsque le train se rapproche de trop près du bord, des champs magnétiques
plus forts sont induits sur le côté concerné, permettant au train de se « recentrer » sur la voie. Le guidage en
translation est possible à partir de différents électroaimants de guidage (indépendants des électroaimants de
propulsion).
Vous pouvez voir ci-dessous une vidéo d'une maquette de monorail utilisant un moteur linéaire synchrone