Commande Visual Basic
|
Action réalisée
|
|
SetDigitalChannel (1)
|
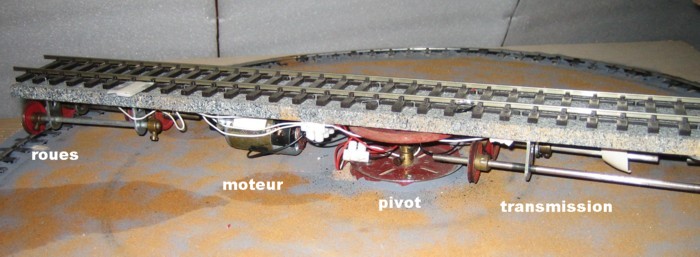
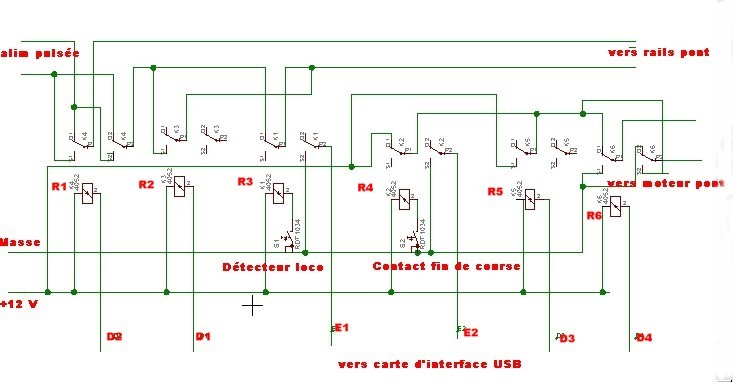
Envoi du courant dans les rails du tablier du pont
|
|
ClearDigitalChannel (1)
|
Coupure du courant dans les rails du tablier du pont
|
|
SetDigitalChannel (2)
|
Courant inverse dans les rails du tablier du pont
|
|
ClearDigitalChannel (2)
|
Courant direct dans les rails du tablier du pont
|
|
SetDigitalChannel (3)
|
mise en marche du moteur du pont
|
|
ClearDigitalChannel (3)
|
arrêt du moteur du pont
|
|
SetDigitalChannel (4)
|
inversion du sens de marche du moteur du pont
|
|
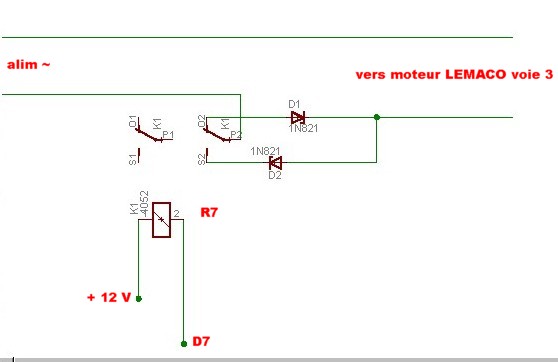
SetDigitalChannel (5)
|
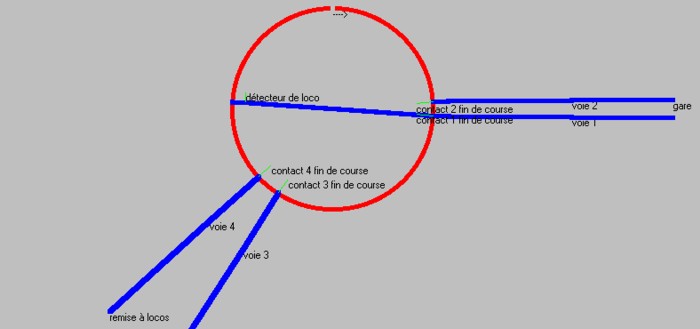
alimentation voie 3 de la remise à locos et sortie de la lame mobile
|
|
ClearDigitalChannel (5)
|
coupure de l'alimentation voie 3 de la remise à locos et rentrée de la lame mobile
|
|
SetDigitalChannel (6)
|
alimentation voie 4 de la remise à locos et sortie de la lame mobile
|
|
ClearDigitalChannel (6)
|
coupure de l'alimentation voie 4 de la remise à locos et rentrée de la lame mobile
|
|
SetDigitalChannel (7)
|
sortie de la lame mobile en face de la voie 1
|
|
ClearDigitalChannel (7)
|
rentrée de la lame mobile en face de la voie 1
|
|
ReadDigitalChannel(1) = 0
|
absence de loco sur le tablier du pont
|
|
ReadDigitalChannel(1) = 1
|
présence de loco sur le tablier du pont
|
|
ReadDigitalChannel(2) = 1
|
détection de fin de course du pont
|